Роботизированный захват – выбор захвата для коллаборативной роботизированной руки

Содержание
Современные коллаборативные роботы предлагают практичность и доступность. Это делает их простыми и экономически эффективными в адаптации. Наиболее существенным преимуществом использования коллаборативных роботов для автоматизации различных процессов является точность и согласованность, которые они обеспечивают.
Коллаборативный робот способен выполнять одни и те же задачи 24 часа в сутки без перерыва, без ущерба для качества продукции или снижения скорости производственного цикла.
Коллаборативные роботы способны выполнять многочисленные задачи, выполняемые людьми. Это делает их идеальными для различных отраслей, таких как медицинские и лабораторные услуги, производство, упаковка и паллетирование. Коллаборативные роботы работают вместе с людьми без риска получения травм.
Чтобы пользоваться выгодами, которые предлагают коллаборативные роботы, ваш кабот должен быть оснащен правильными функциями и инструментами. Таким образом, коллаборативный робот сможет выполнять различные задачи эффективно и результативно.
Роботизированные захваты являются важной частью роботизированной руки. Чтобы убедиться, что вы выбрали идеальный роботизированный захват для ваших нужд, вам необходимо рассмотреть определенные факторы, как предложено Universal-Robots.
Операционная среда
Источник: ifr.org
При выборе идеального захватного устройства для робота важным фактором является рабочая среда, в которой вы планируете его использовать.
Захваты бывают с разной механикой, подходящей для разных рабочих сред. Например, гидравлические и пневматические силовые захваты идеально подходят для некоторых роботов, но не для других.
Известно, что гидравлические захваты проливают масло, тогда как пневматические захваты в основном вызывают загрязнение. Принимая во внимание рабочую среду потенциального захвата, становится легче выбрать наименее проблемный для задачи.
Еще один момент, который следует учесть, — будет ли захват использоваться на линиях по производству продуктов питания или фармацевтики, поскольку существуют более строгие правила использования робототехники в производстве товаров, которые будут потребляться людьми. Это делает гидравлические захваты небезопасными для такого типа среды из-за их проблемы с утечкой.
С другой стороны, пневматические захваты идеально подходят для использования на судоходных линиях и при транспортировке грузов. Однако из-за проблемы загрязнения они не подходят для использования в медицинских учреждениях, таких как лаборатории, больницы и т. д. Они загрязняют стерилизованное оборудование и делают его непригодным для использования, а это не то, чего хочет любой человек в медицинской и научной сфере.
Крайне важно проанализировать среду, в которой должен работать коллаборативный робот, и цели его использования. Если вы сможете это понять, вы сможете выбрать идеальный захват для своего коллаборативного робота и сделать его максимально производительным и эффективным.
Форма области применения

Источник: automate.org
Чтобы выбрать идеальный захват для робота, важно учесть особенности вашего проекта, особенно ту часть, на которой будет использоваться захват.
Причина, по которой это важно, заключается в том, что разные захваты предназначены для разных форм и, таким образом, лучше подходят для целевого использования. Если вы планируете использовать захват на плоских деталях, лучшим выбором будет тот, который может захватывать детали сверху, как захват с присоской.
Захват с присоской также идеально подходит для захвата деталей с параллельными гранями. Однако захват лучше, если он осуществляется с помощью захвата с пальцем.
Как правило, при выборе идеального захвата для разных деталей следует учитывать количество пальцев, которые человек использует для захвата детали. Это позволяет легко выбрать идеальный захват для разных деталей в зависимости от их использования.
Также важно учитывать досягаемость пальцев вашего захвата. Вы не хотите, чтобы захваты были слишком длинными, но и слишком короткими их тоже не следует делать. Это связано с тем, что захваты с короткими пальцами не смогут удерживать все объекты, которые вы хотите.
Напротив, захваты со слишком большим вылетом пальцев требуют большего крутящего момента и мощности, и если для объектов, которые вы хотите обрабатывать, дополнительная длина пальцев не нужна, то приобретение захвата с большим вылетом пальцев обернется для вас ненужными расходами на электроэнергию, которая вам не так уж и нужна.
Частичное трение

Источник: automate.org
Трение или деталь, которую вы собираетесь захватить с помощью захвата робота, являются важным фактором, который следует учитывать при выборе подходящего захвата для детали.
Как правило, захват с рифлеными пальцами лучше подходит для работы с круглыми формами по сравнению с захватами с пальцами. Использовать захват с пальцами сложнее, когда нужно центрировать объект, поэтому рифленые пальцы лучше.
При работе с деталями с неровными краями лучше использовать захваты без пазов, поскольку у них есть края, обеспечивающие достаточное сопротивление для идеального захвата. При работе с гладкими цилиндрическими деталями лучше использовать захват с пазовыми пальцами.
Трение может показаться не таким уж важным фактором, но представьте себе ситуацию, когда вы работаете с деликатными, мягкими объектами, а захват на руке вашего коллаборативного робота не имеет канавок. Это может легко привести к тому, что объекты выскользнут из руки робота, сломаются или получат необратимые повреждения.
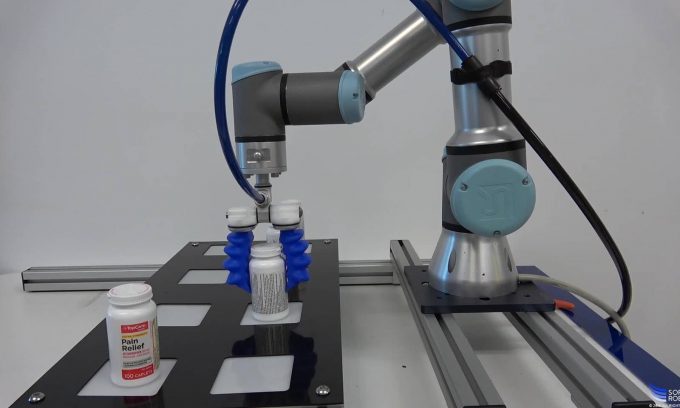
Пневматические захваты могут работать с большинством объектов независимо от их поверхности, размера или формы, но в случае с объектами, имеющими скользкую поверхность, они могут выйти из строя, поскольку их механические пальцы не имеют возможности захватить эти объекты. В этом случае могут пригодиться вакуумные захваты с присосками.
Цена
Источник: universal-robots.com
Что касается ценообразования, стоимость захвата робота зависит от силового компонента захвата. Электрические, пневматические, гидравлические, всасывающие и магнитные типы определяют цену захвата. Силовая механика определяется технологией производства, используемой для их изготовления.
Как и любые другие инвестиции, вам нужно убедиться, что покупка захвата робота имеет финансовый смысл для вашего бизнеса. Сколько денег вы потратите, определяется тем, каковы ваши потребности в руке как пользователя.
Если вы планируете использовать захват для перемещения специальных деталей, требующих особого ухода, лучше приобрести специализированный захват, даже если он и стоит дороже.
Специализированные захваты, такие как мягкие захваты, могут быть дороже других захватов, но их ценность в виде точного касания и идеального обращения с объектами сложной формы может оказаться гораздо более полезной для вашего бизнеса или организации, чем стандартные захваты.
С другой стороны, если вы планируете использовать захват для работы с обычными деталями, которые не требуют специализированного обращения, покупка доступного захвата имеет больше финансового смысла. Такие захваты обычно можно увидеть на складах и линиях поставок по транспортировке продукции, где они могут легко поднимать большие коробки с недорогими по стоимости предметами.
Если у вас уже есть захват, его можно настроить для других рабочих описаний. Однако настроенные захваты обычно менее гибкие по сравнению с теми, которые созданы для конкретной задачи. Вот почему мы не рекомендуем настраивать захват, если только конкретный захват не слишком дорог, чтобы вывести его из эксплуатации, или его можно легко перепрограммировать для других целей.
Заключение
Выбор идеального захвата для руки вашего коллаборативного робота может быть сложным делом, особенно учитывая широкое применение и типы захватов. Мы надеемся, что эта статья помогла вам выбрать идеальный захват для вашей коллаборативной роботизированной руки, и если это так, пожалуйста, рассмотрите возможность следить за нашим сайтом, так как он нам очень поможет.

